.png)
Qingdao Sunrise International Trade Co., Ltd.


- Página inicial
- Produtos
- Não químicos
- Robô de escalada para remoção de ferrugem e pulverização de tinta
Robô de escalada
-

-
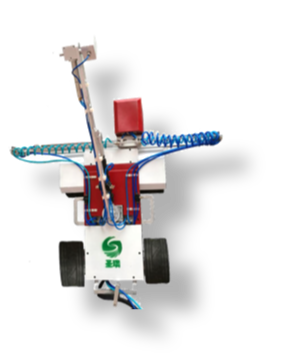
Robô para remoção de ferrugem
Design modular, composto principalmente por adsorção magnética de três rodas e manipulador de spray de água de alta pressão. A estrutura do robô possui características de manutenção compacta, grande carga, destacável, conveniente etc., que podem atender aos requisitos de várias condições ambientais.
A unidade de adsorção adota uma adsorção de ímã permanente com alta eficiência de adsorção e peso leve, e a estrutura de três rodas é flexível para girar através de duas rodas de velocidade diferenciais.
Adote a tecnologia de jato de água de alta pressão para melhorar a eficiência da remoção de ferrugem e reduzir a poluição ambiental.
A remoção automática da ferrugem do capacete é feita no modo manual e o movimento automático no modo de controle de operação de telecontrole sem fio. -

-
-
Robô de pintura
Design modular, composto principalmente por adsorção magnética com corpo móvel de quatro rodas, módulo de manipulação de tinta recíproca para operação em grandes áreas e módulo de máquina de pintura rotativa para operação em bordas e cantos.
A unidade de adsorção adota adsorção de ímã permanente com alta eficiência de adsorção e peso leve.
O modo de movimento fornece a força motriz para as quatro transmissões e gira através da velocidade diferencial entre duas rodas. As quatro rodas adotam mecanismo flexível independente para realizar o movimento girando na parede de metal com diferentes raios de curvatura.
O modo de controle da operação remota sem fio é adotado e a operação de pulverização automática de tinta da carroceria é realizada de maneira manual e com movimentação automática.




