.png)
Qingdao Sunrise International Trade Co., Ltd.


- Inicio
- Productos
- No químicos
- Robot escalador de paredes para eliminación de óxido y pulverización de pinturas
Robot de escalada
-

-
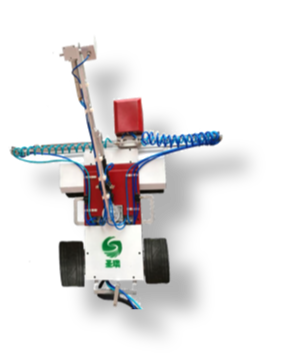
Robot de eliminación de óxido
Diseño modular, que se compone principalmente de adsorción magnética de tres ruedas y manipulador con rociador de agua a alta presión. La estructura del robot tiene las características de mantenimiento compacto, de gran carga, desmontable, conveniente, etc., que puede cumplir con los requisitos de diversas condiciones ambientales.
La unidad de adsorción adopta una adsorción de imán permanente con alta eficiencia de adsorción y peso ligero, y la estructura de tres ruedas es flexible para girar a través de dos ruedas de velocidad diferencial.
Adoptar tecnología de chorro de agua a alta presión para mejorar la eficiencia de eliminación de óxido y reducir la contaminación ambiental.
La eliminación automática del óxido del casco se realiza mediante el modo manual y el movimiento automático mediante el modo de control de la operación de telecontrol inalámbrico. -

-
-
Robot de pintura
Diseño modular, que se compone principalmente de adsorción magnética con cuerpo móvil de cuatro ruedas, módulo de manipulación de pintura recíproca para operación de área grande y módulo de máquina rotativa de pintura para operación de borde y esquina.
La unidad de adsorción adopta adsorción de imán permanente con alta eficiencia de adsorción y peso ligero
El modo de movimiento proporciona la fuerza motriz para las cuatro unidades y gira a través de la velocidad diferencial entre dos ruedas. Las cuatro ruedas adoptan un mecanismo flexible independiente para realizar el movimiento que gira sobre la pared de metal con diferentes radios de curvatura.
Se adopta el modo de control de la operación remota inalámbrica, y la operación de pulverización automática de pintura del cuerpo del barco se realiza de forma manual y automática.




