.png)
青岛森瑞思国际贸易有限公司


除锈和喷漆的壁式机器人
-

-
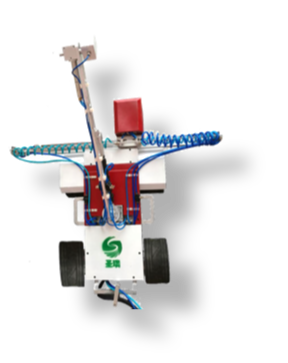
除锈机器人
采用模块化设计理念,主要由磁吸三轮和高压水喷淋机械手组成。 该机器人结构具有结构紧凑,负载大,可拆卸,维护方便等特点,可满足各种环境条件的要求。
吸附装置采用永磁吸附,吸附效率高,重量轻,三轮结构灵活,可通过两个差速轮。
采用高压水射流技术,提高除锈效率,减少环境污染。
采用无线遥控操作控制方式,采用手动和自动移动方式实现船体自动除锈。油漆喷涂机器人
采用模块化设计理念,主要由磁吸附四轮运动体,大面积操作往复喷涂机械手模块和边角操作旋转喷涂机模块组成。
吸附装置采用永磁吸附,吸附效率高,重量轻。
运动模式为四个驱动器提供驱动力,并通过两个轮子之间的差速转动。 四个轮子采用独立的柔性机构,实现不同曲率半径的金属壁运动转动。
采用无线遥控操作控制方式,以手动,自动方式实现船体自动喷漆操作。 -





